Contributors
Martin DanelljanGoutam Bhat
Projects
ICCV 2019: Learning Discriminative Model Prediction for Tracking.
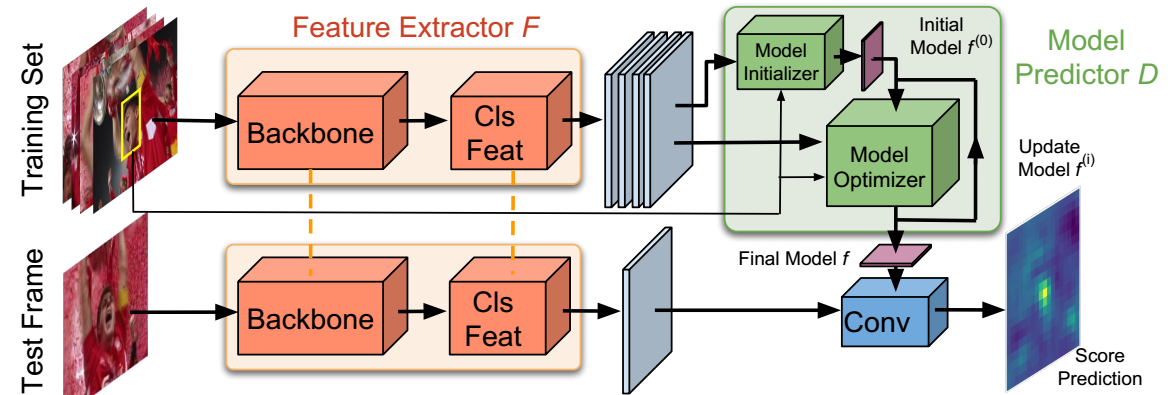
In this work, we develop an end-to-end tracking architecture, capable of fully exploiting both target and background appearance information for target model prediction. Our architecture is derived from a discriminative learning loss by designing a dedicated optimization process that is capable of predicting a powerful model in only a few iterations. Furthermore, our approach is able to learn key aspects of the discriminative loss itself. The proposed tracker sets a new state-of-the-art on 6 tracking benchmarks, while running at over 40 FPS.
[Project] [Paper] [Code]
[Project] [Paper] [Code]
CVPR 2019: ATOM: Accurate Tracking by Overlap Maximization
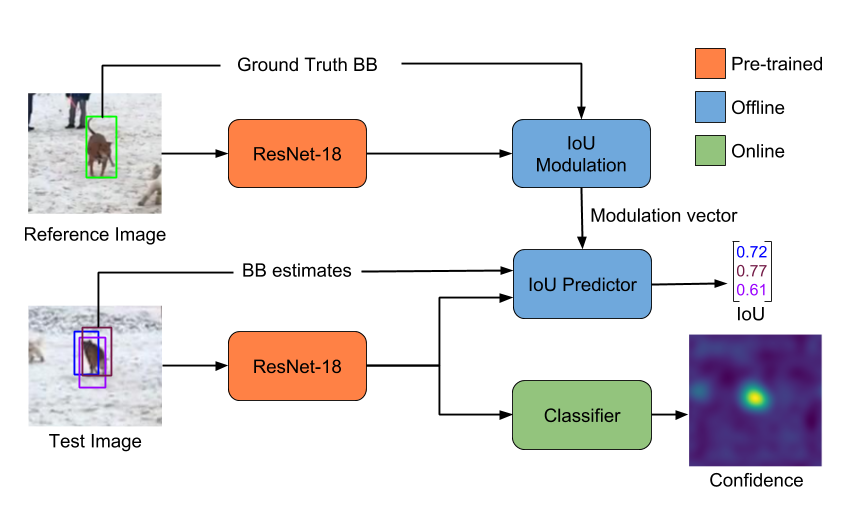
In this work we primarily address the problem of performing accurate bounding box estimation for generic visual tracking. We train a target estimation module offline, conditioned on the target appearance, to predict the overlap between the object and a bounding box estimate. Furthermore, we propose a target classification component that is learned online using dedicated optimization techniques.
[Project] [Paper] [Code]
[Project] [Paper] [Code]
CVPR 2017: ECO: Efficient Convolution Operators for Tracking
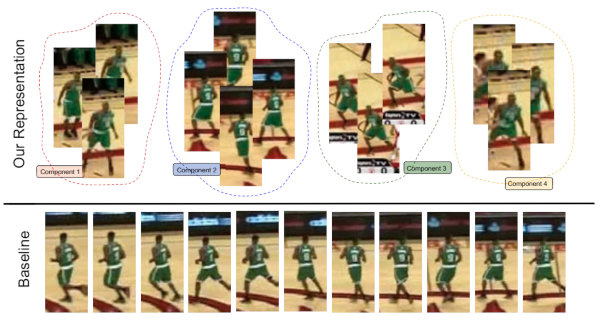
In this work we tackle the key causes behind the problems of computational complexity and over-fitting in advanced DCF trackers. We revisit the core DCF formulation and introduce: (i) a factorized convolution operator, which drastically reduces the number of parameters in the model; (ii) a compact generative model of the training sample distribution, that significantly reduces memory and time complexity, while providing better diversity of samples; (iii) a conservative model update strategy with improved robustness and reduced complexity.
[Project] [Paper] [Code]
[Project] [Paper] [Code]